

机密★启用前
2024 年 10 月高等教育自学考试全国统一考试
机电一体化系统设计
(课程代码 02245)
1.注意事项本试卷分为两部分,第一部分为选择题,第二部分为非选择题。
2.应考者必须按试题顺序在答题卡 (纸) 指定位置上作答,答在试卷上无效。
3.涂写部分、画图部分必须使用 2B 铅笔,书写部分必须使用黑色字迹签字笔。
第一部分 选择题
一、单项选择题:本大题共 10 小题,每小题 1 分,共 10 分。在每小题列出的备选项中只有一项是最符合题目要求的,请将其选出。
1.机电一体化用英文叫做( )
A. electrodynamics
B. mechatronics
C. electronics
D. mechanics
2.机电一体化系统设计中,处理 “机” 与 “电” 关系的原则是( )
A. “机” 取代 “电”
B. 简化电子系统
C. 增强机械系统
D. 软件代替硬件
3.减速系统齿轮副的消隙方法是( )
A. 调整中心距
B. 双螺母垫片
C. 单螺母自预紧
D. 双螺母螺纹
4.正确的丝杠的支撑结构形式是( )
A. 双推 – 双推
B. 双推 – 悬挂
C. 单推 – 自由
D. 单推 – 简支
5.光电编码器的两种类型为( )
A. 鉴相式与鉴幅式
B. 绝对式与增量式
C. 反射式与投射式
D. 正向式与反向式
6.以下为传感器时域动态性能指标的是( )
A. 谐振峰值
B. 复现频率
C. 截止频率
D. 最大超调量
7.直流伺服电动机的机械特性曲线为一组( )
A. 斜率为正的直线
B. 斜率为负的直线
C. 第一象限抛物线
D. 第一象限圆弧线
8.永磁同步电动机的两种驱动方式之一是( )
A. 异步电动机
B. 直流电动机
C. 力矩电动机
D. 交流电动机
9.交流感应电动机启动时的转差率一般为( )
A. 1
B. -0.01
C. 0
D. 0.01
10.在自动控制系统中,步进电动机通常用于控制系统的( )
A. 半闭环控制
B. 闭环控制
C. 开环控制
D. 前馈控制
第二部分 非选择题
二、填空题:本大题共 10 小题,每小题 1 分,共 10 分。
11.通过计算机网络,将计算机辅助设计、计算机辅助规划以及计算机辅助制造等,统一连成一个大系统,称之为______。
12.伺服系统 (Servosystem) 又称为______系统,它是一种反馈控制系统,其受控变量是机械运动。
13.为了保证柔轮变形的对称性,双滚子谐波齿轮刚轮与柔轮的齿数差最好为______。
14.滚动轴承的精度等级分为______级。
15.顺序控制系统可以按照预先规定次序完成一系列操作,因此通常用______作顺序控制器。
16.当直线感应同步器的滑尺在定尺上滑动一个节距时,定尺绕组感应电动势幅值将变化______个周期。
17.交流感应电动机的机械特性曲线上有一个点\((ωₘ’,Tₘₐₓ),其中Tₘₐₓ表示该曲线上的最大电磁转矩,则电动机稳定工作时的转速ω与ωₘ的关系是______。
18.直流伺服电动机的电压到转角的传递函数近似为一惯性系统,其惯性时间常数随转子的两个参数______与转动惯量J的增大而增大。
19.步进电动机在较高转速的情况下,其电磁转矩会随转速增大而______。
20.PID 控制中的______可以提高系统无静差度。
三、简答题:本大题共 6 小题,每小题 5 分,共 30 分。
21.典型机电一体化系统有哪些?
22.丝杠螺母副消除间隙与预紧的方法有哪些?
23.测量模块在机电一体化系统中的作用是什么?
24.常用的直流伺服电动机驱动电路有哪几种类型?
25.伺服系统设计时采用电流环结构的优点有哪些?
26.相对于一般伺服电动机,步进电动机有哪些特点?
四、简单应用题:本大题共 5 小题,每小题 6 分,共 30 分。
27.一个步进电动机驱动的工作台系统,由步进电动机 – 减速器 – 丝杠螺母副 – 工作台串联构成。步进电动机步矩角 θ = 1.5°,丝杠导程 P = 6mm ,工作台的脉冲当量 δ = 10μm 。计算减速比,并确定减速箱齿轮齿数。
28.有一个 5000 线的光电编码器,采样周期为 4ms。问:(1) 轴的转速为 1500r/min 时所产生的计数是多少?(2) 计数值为 1024 对应的转速是多少?
29.三相交流感应电动机的极对数 p = 2 ,供电电源频率 f = 50Hz ,空载转速为 1450r/min。计算:(1) 空载时,转子、定子绕组的电动势频率;(2) 堵转时,转子、定子绕组的电动势频率。
30.某 4 相反应式步进电动机采用四相八拍运行方式时的步距角 θ=1.0°。计算:该电动机的驱动脉冲频率 1800Hz 时的转速。
31.某单位负反馈的闭环伺服系统,其开环传递函数为 G(s)= 0.25/[s(s+0.1)],计算其系统自然频率、阻尼比,以及系统增益。
五、综合应用题:本大题共 2 小题,每小题 10 分,共 20 分。
32. x – y 平面上直线运动路径的源点为 (0,0) ,终点为 (12,10) ,两轴速度限制分别为 vₓₘₐₓ= ±6 ,\(vᵧₘₐₓ = ±8 ,加速度限制分别为 aₓₘₐₓ= ±2 , aᵧₘₐₓ= ±3 。设计三次多项式样条函数点位控制指令。
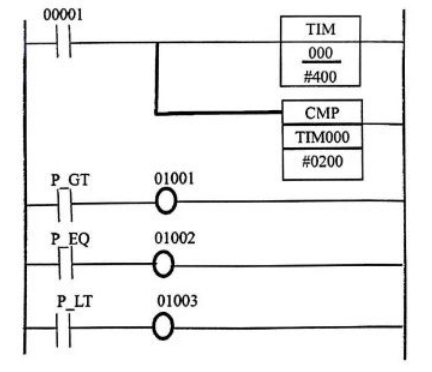
33.写出下图所示梯形图对应的指令程序。说明其控制功能。
(2)本站自学考试信息供自考生参考,权威信息以各省(市)考试院官方为准。

![【真题+答案】[广东]2020年1月自考06270技术经济学试卷-自考菌](https://www.exam100.net/uploadfile/2022/1102/20221102034431553.png)

暂无评论内容