

机密★启用前
2024年4月高等教育自学考试全国统一考试
机电一体化系统设计
(课程代码 02245)
注意事项:
1.本试卷分为两部分,第一部分为选择题,第二部分为非选择题。
2.应考者必须按试题顺序在答题卡(纸)指定位置上作答,答在试卷上无效。
3.涂写部分、画图部分必须使用 2B铅笔,书写部分必须使用黑色字迹签字笔。
第一部分选择题
一、单项选择题:本大题共 10小题,每小题1分,共10分。在每小题列出的备选项中只有一项是最符合题目要求的,请将其选出。
1.利用预先决定的指令控制一系列加工作业的系统为
A.伺服系统
B.自动引导车系统
C.顺序控制系统
D.数控系统
2.由于左右齿推力平衡,而不产生轴向推力的齿轮为
A.直齿轮
B.斜齿轮
C.人字齿轮
D.直齿锥齿轮
3.在常用的滚珠丝杠螺母副消除间隙和适当预紧方法中,调整精度高、预紧准确可靠、不易松动、调整方便的调整方法是
A.双螺母齿差式
B.双螺母螺纹式
D.单螺母变位导程自预紧式
C.双螺母垫片式
4.下列指标中,不是用来描述传感器和测量系统静态特性的是
A.精度
B.误差
C.重复性
D.上升时间
5.下面常用电动机中,属于固定磁阻电动机的是
A.交流伺服电动机
B.直线步进电动机
C.永磁式步进电动机
D.超声波电动机
6.如果反应式步进电动机的通电顺序是 A→C→B-A一。转子有四个齿,ABC 绕组顺时针排序,则该步进电动机
A.顺时针旋转,步距角为15°
B.顺时针旋转,步距角为 30°
C.反时针旋转,步距角为 15°
D.反时针旋转,步距角为 30°
7.CX-Programmer 编程软件的主要用途是
A.PLC 编程
B.机器人控制
C.人机界面编程
D.传感器和反馈控制
8.伺服系统可分为半闭环伺服系统和全闭环伺服系统,全闭环系统的最大优点是
A.可节省投资
B.控制精度高
C.调试维修方便
D.应用广泛
9.以下哪一种运动控制对于轨迹上的每一点坐标都具有一定的精度要求,不仅要求路径连续,而且要求速度连续?
A.点位控制
B.直线运动控制
C.连续路径控制
D.力和力矩控制
10.西门子S7系列 PLC 可分为微型PLC,小规模性能要求的 PLC 和中、高性能要求的 PLC,下列属于微型 PLC的是
A.SIMATIC S7-100 PLC
B. SIMATIC S7-200 PLC
C.SIMATIC S7-300 PLC
D.SIMATIC S7-400 PLC
第二部分 非选择题
二、填空题:本大题共 10小题,每小题1分,共10分。
11.在数控自动化制造系统中,CIMS的含义是______系统。
12.机电一体化系统模块中的控制模块包括通信模块、______模块、软件模块和接口模块。
13.机械传动主要有齿轮、蜗杆传动,丝杠螺母传动和______传动三种形式。
14.根据传感器类型不同,由传感器经过信号调理之后,所得到的信号形式可以分为数字量、计数脉冲量和______。
15.直流电动机的主要组成包括三部分:定子磁极、电枢和______。
16.根据工作原理,步进电动机分为反应式、永磁式和______三种。
17.______是反馈控制系统,也是由控制器、受控对象、反馈测量装置以及比较器等部分组成。
18.电流环的输入是______,输出是电动机电枢电流石。
19.通常,已知运动轨迹的起点和终点坐标以及轨迹的曲线方程,由计算机实时地计算出各______,一般把这个过程叫做“插补”。

三、简答题:本大题共6小题,每小题5分,共30分。
21.导轨按导轨面间的摩擦性质可分为哪几种类型?
22.传感器性能指标中的动态特性反映测量快速变化的性能,时域分析性能指标是以系统对单位阶跃输入的瞬态响应形式给出的,瞬态响应性能指标包括哪些?
23.步进电动机单级性驱动电路中续流二极管的作用是什么?
24.简述运动控制中的点位控制和连续路径控制的定义和特点。
25.简述 PLC控制和通用微型计算机控制的区别。
26.PID 控制器由比例(P)、积分(I)和微分(D)三个参数组成,请说明各个参数在 PID控制器中的校正作用是什么?
四、简单应用题:本大题共5小题,每小题6分,共30分。
27.设某转速数据采集系统,电动机的转速由码盘式转速传感器测量,码盘式速度传感器输出脉冲频率与电动机转速成正比。若码盘圆周上的孔数为75,求:
(1)当码盘传感器输出信号的频率为150Hz时,电机的转速为多少?
(2)当电机由静止开始加速到2000r/min,在此过程中码盘传感器输出信号的频率范围为多少?
28.某交流电动机同步转速为 3000r/min,实际转速为 2700r/min,电源频率为50Hz,
求:(1)该电动机的极对数:(2)该电动机的转差率。
29.已知步进电动机相电流接通顺序为A-AB-B-BC-C-CA-A,其转子齿数为 40。
试求:(1)步距角Os.;(2)裕量角Or。
30.在xy平面内以恒定速度由(0,0)点运动到(30,40)点,设采样周期为0.02s,规定完成该运动的时间为10s。
(1)求该运动的速度:(2)推导出两点间的直线插补递推计算公式。
31.(1)写出下图所示梯形图的布尔代数方程。
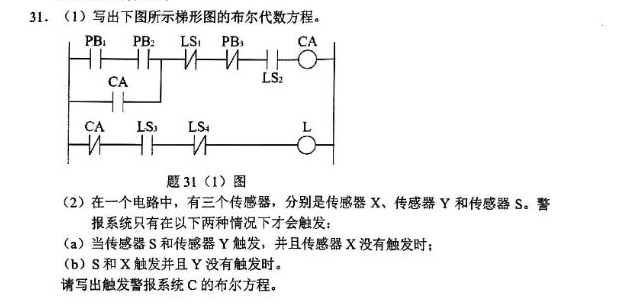
题31(1)图
(2)在一个电路中,有三个传感器,分别是传感器X、传感器Y和传感器S。警报系统只有在以下两种情况下才会触发:
(a)当传感器S和传感器Y触发,并且传感器X没有触发时;
(b)S 和X触发并且Y没有触发时。
请写出触发警报系统C的布尔方程。
五、综合应用题:本大题共2小题,每小题10分,共20分。
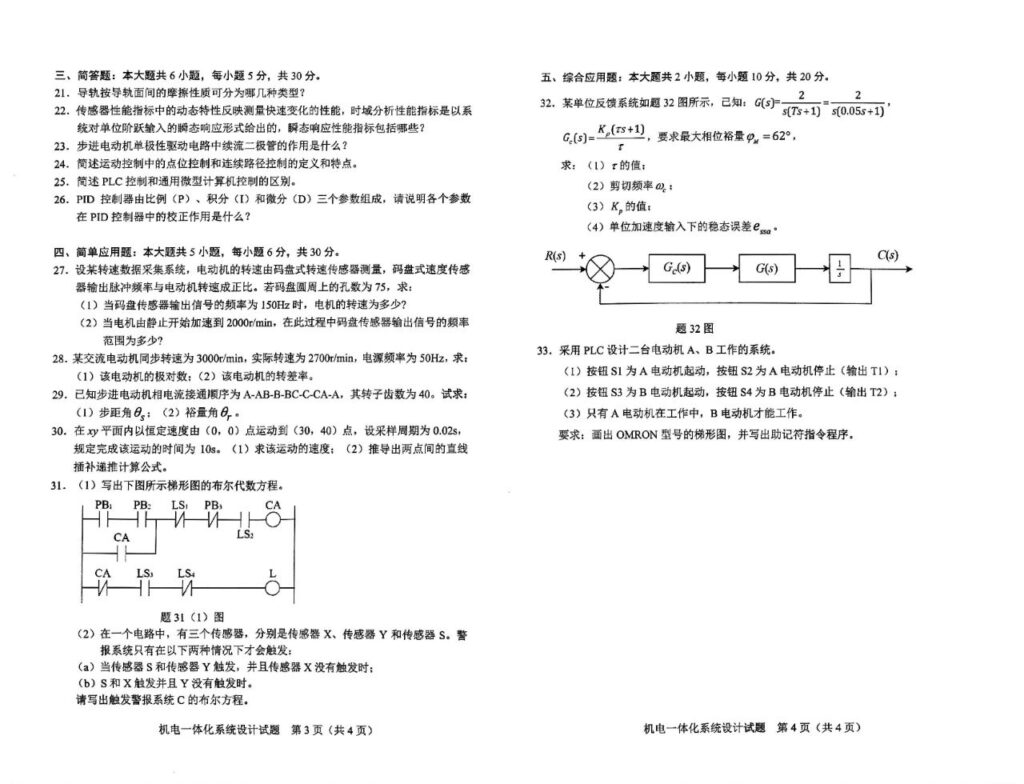
32.某单位反馈系统如题 32图所示,已知
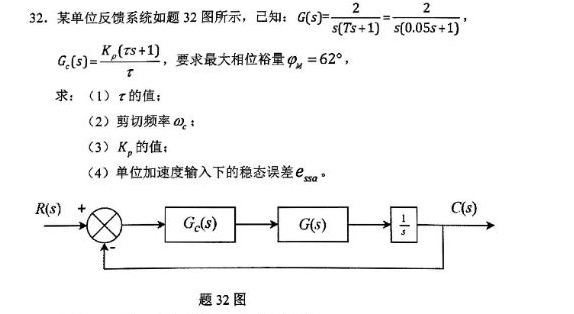
题 32 图
33.采用PLC 设计二台电动机 A、B 工作的系统。
(1)按钮S1为A电动机起动,按钮S2为A电动机停止(输出T1);
(2)按钮S3为B电动机起动,按钮S4为B电动机停止(输出T2):
(3)只有A电动机在工作中,B电动机才能工作。
要求:画出 OMRON 型号的梯形图,并写出助记符指令程序。
(1)写出下图所示梯形图的布尔代数方程。
(2)本站自学考试信息供自考生参考,权威信息以各省(市)考试院官方为准。



教材2023版.jpg)

暂无评论内容