

机密★启用前
2024 年 10 月高等教育自学考试全国统一考试
电力拖动控制系统
(课程代码 03802)
注意事项:
1.本试卷分为两部分,第一部分为选择题,第二部分为非选择题。
2.应考者必须按试题顺序在答题卡(纸)指定位置上作答,答在试卷上无效。
3.涂写部分、画图部分必须使用 2B 铅笔,书写部分必须使用黑色字迹签字笔。
第一部分 选择题
一、单项选择题:本大题共 15 小题,每小题 1 分,共 15 分。在每小题列出的备选项中只有一项是最符合题目要求的,请将其选出。
1.电力拖动自动控制系统 —— 运动控制系统的控制对象是
A. 内燃机
B. 电动机
C. 控制器
D. 传感器
2.系统的调速范围是 1000 – 100 r/min,要求静差率 s≤2%,则系统允许的静差转速降是
A. Δn = 1.25rpm
B. Δn = 2.04rpm
C. Δn = 2.83rpm
D. Δn = 3.50rpm
3.某直流调速系统电动机额定转速为 nN=1430 r/min,额定速降 ΔnN=115 r/min,当要求静差率 s≤30% 时,允许的调速范围是
A. D=3.1
B. D=4.5
C. D=5.3
D. D=5.8
4.将光电式旋转编码器与电动机相连,当电动机转动时,带动编码器旋转,则会产生
A. 转速或转角信号
B. 位移信号
C. 加速度信号
D. 脉冲信号
5计算一个采样周期内旋转编码器发出的脉冲个数来算出转速的方法称为频率法测速,该方法计算公式是
A. n = 60f₀/ZM₂
B. n = 60f₀M₁/ZM₂
C. n = 60M₁/ZM₂
D. n =60M₁/ZMTₑ
6.当在转速反馈控制直流调速系统上加给定电压时,电枢电压会立即达到它的最高值,这对电动机而言,相当于全压起动,则会导致电动机
A. 过电容
B. 过电压
C. 过电流
D. 过电阻
7.直流双闭环调速系统中出现电源电压波动和负载转矩波动时,则
A. ACR 抑制电网电压波动,ASR 抑制转矩波动
B. ACR 抑制转矩波动,ASR 抑制电压波动
C. ACR 放大转矩波动,ASR 抑制电压波动
D. ACR 放大电网电压波动,ASR 抑制转矩波动
8.采用工程设计方法来设计转速、电流反馈控制直流调速系统的原则是
A. 先内环后外环
B. 先外环后内环
C. 先转速环后电流环
D. 不确定
9.转速、电流反馈控制直流调速系统中转速调节器开环传递函数有多少个积分环节
A. 1
B. 2
C. 3
D. 4
10.双极式控制的桥式可逆 PWM 变换器的缺点是
A. 电流连续
B. 能四象限运行
C. 停车时有微振电流
D. 四个开关器件可能都处于开关状态
11.普通逻辑无环流可逆调速系统中换向时待工作组投入工作时,电动机所处的状态是
A. 回馈制动
B. 反接制动
C. 能耗制动
D. 自由停车
12.异步电动机同步转速与电源频率之间的关系是
A. 反比
B. 正比
C. 二次
D. 加和
13.异步电动机当转差率 s 相同时,则
A. 采用恒定定子磁通控制方式的电磁转矩大于恒压频比控制方式
B. 采用恒定定子磁通控制方式的电磁转矩小于恒压频比控制方式
C. 采用恒定定子磁通控制方式的电磁转矩等于恒压频比控制方式
D. 采用恒定定子磁通控制方式的电磁转矩与恒压频比控制方式大小不确定
14.当三相绕组和两相绕组产生的旋转磁动势大小和转速都相等时,即认为两相绕组与三相绕组等效,这就是
A. 2/3 变换
B. 3/2 变换
C. 1/2 变换
D. 1/3 变换
15.直接转矩控制与矢量控制相比,具有的优点是
A. 调速范围宽
B. 控制性能受转子参数影响大
C. 计算复杂
D. 控制结构简单
第二部分 非选择题
二、填空题:本大题共 5 小题,每小题 1 分,共 5 分。
16.在 V – M 系统中,脉动电流会增加电动机的发热,同时也产生______,对生产机械不利。
17.如果所要求的______一定,则闭环系统可以大大提高调速范围。
18.由于二极管整流器导电的单向性,电能不可能通过整流器送回交流电网,只能向滤波电容充电,使电容两端电压升高,称作______。
19.在基频以下,由于磁通恒定,允许输出转矩恒定,属于 “______” 方式。
20.按转子磁链定向的矢量控制系统的关键是______,也就是说需要获得转子磁链矢量的空间位置。
三、简答题:本大题共 6 小题,每小题 5 分,共 30 分。
21.简述晶闸管整流器在运行中存在的问题。
22.简述转速调节器(ASR)的作用。
23.简述双极式控制的桥式可逆 PWM 变换器的优点和缺点。
24.简述异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统的原因。
25.简述研究异步电动机的三相数学模型时需要作的假设。
26.简述矢量控制系统的特点与存在的问题。
四、计算题:本大题共 1 小题,每小题 7 分,共 7 分。
27.转速闭环调速系统的开环放大倍数为 15 时,额定负载下电动机的速降为 8 r/min,如果将开环放大倍数提高到 30,它的速降为多少?在同样静差率要求下,调速范围可以扩大多少倍?
五、解答题:本大题共 2 小题,每小题 14 分,共 28 分。
28.旋转编码器光栅数 1024,倍频系数 4,高频时钟脉冲频率f₀=1MHz,旋转编码器输出的脉冲个数和高频时钟脉冲个数均采用 16 位计数器,M 法测速时间为 0.01s,求采用 T 法测速时,转速分别为 n=1500r/min 和 n=150r/min 时的测速分辨率和误差率最大值,并判断该方法适用范围。
29.双闭环调速系统的 ASR 和 ACR 均为 PI 调节器,设系统最大给定电压U*ₙₘ=15V,n៷=1500r/min\),I៷=20A,电流过载倍数为 2,电枢回路总电阻R = 2Ω,Ks=20,Cₑ=0.127V·min/r,求:(1)当系统稳定运行在U*ₙ=5V,I_dL=10A时,系统的n、Uᵢ*、Uᵢ和Uc各为多少?(2)当电动机负载过大而堵转时,Uᵢ*和U_c各为多少?
六、分析题:本大题共 1 小题,每小题 15 分,共 15 分。
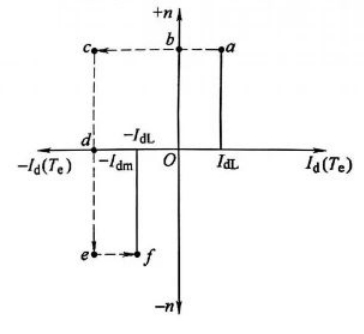
30.基于下图分析直流 PWM 可逆直流调速系统转速反向的过渡过程。
2024 年 10 月高等教育自学考试全国统一命题考试
03802 电力拖动控制系统 参考答案
一、单项选择题:本大题共 15 小题, 每小题 1 分,共 15 分。
1.B 2.B 3.C 4.D 5.D
三、简答题:本大题共 6 小题,每小题 5 分共 30 分。
21. 产生谐波污染电网,需额外滤波装置。
深控时功率因数低,影响电网效率。
换相失败风险大,尤其在电网电压异常时。
体积重量大,因需配置滤波与保护电路。
响应速度较慢,不如全控型器件灵活。
22.作为双闭环调速系统的外环,根据转速偏差调节电流给定值。
控制电机转矩以实现转速跟踪,具备限幅功能防止过流。
23.优点:四象限运行能力,动态响应快,电流连续且转矩脉动小。
缺点:开关损耗大,存在桥臂直通风险,控制复杂需精确死区设置。
24.高阶:多变量(电压、电流、磁链、转速)需联立微分方程。
非线性:磁饱和、参数时变及模型中转速与磁链的乘积项。
强耦合:定转子变量相互影响(如转矩与磁链耦合)。
25.三相绕组对称且空间分布均匀。忽略磁饱和,磁路线性;
忽略铁损与温度影响。
气隙均匀,无齿槽效应;绕组视为集中绕组简化分析。
26.特点:解耦转矩与磁链,实现直流电机式控制;动态性能优异,调速范围广。
问题:依赖电机参数准确性(如转子时间常数);计算复杂,需高性能处理器;低速时观测精度不足,传感器成本高。
四、计算题:本大题共 1 小题,每小题 7 分,共 7 分。
27. (1)开环放大倍数提高后的速降计算
根据转速闭环调速系统的速降公式:Δn=(Δn_open)/(1 + K)
当开环放大倍数K₁=15时,额定负载速降为Δn₁=8r/min。由此可求得开环时的速降:
Δn_open=Δn₁·(1 + K₁)=8·16 = 128r/min.
当K₂=30时,新的速降为:
Δn₂=Δn_open/(1 + K₂)=128/31≈ 4.13r/min.
(2)调速范围扩大倍数计算
调速范围D与速降Δn成反比,即:
D₂/D₁ =Δn₁\Δn₂=8/4.13 ≈1.94.
最终答案:
开环放大倍数提高到 30 时,速降为 4.13 r/min。
调速范围可扩大约 1.94 倍。
五、解答题:本大题共 2 小题,每小题 14 分,共 28 分。
28. T 法测速分辨率与误差率计算
已知参数:
光栅数Z₀=1024,倍频系数 4,总脉冲数\(Z = 4096\)脉冲 / 转;
高频时钟频率f₀=1MHz,计数器位数 16 位(最大计数值 65535)。
公式推导:
T 法测速公式:n=60f₀/Z·m,其中m为时钟脉冲数。
分辨率:Δn=60f₀/Z·m²。
最大误差率:δ_max=1/(m + 1) x 100%。
计算:
1. 当n = 1500r/min:
m=(60 x 10⁶)/(1500 x 4096) ≈ 9.77。
分辨率:Δn=(60 x 10⁶)/(4096 x 9.77²) ≈ 153.6r/min。
误差率:δ_max=1/(9.77+ 1) ≈ 9.28%。
2.当n = 150r/min:
m=(60 x 10⁶)/(15 x 4096) ≈ 97.66。
分辨率:Δn=(60 x 10⁶)/(4096 x 97.66² ≈ 1.52r/min。
误差率:δ_max=1/(97.66+1) ≈ 1.01%。
结论:T 法适用于低转速测量(如 150r/min),高转速时误差率大,分辨率低。
29.双闭环调速系统分析
已知参数:
Uₙₘ*=15V,nN=1500r/min,I៷=20A,过载倍数 2,R = 2Ω,Kₛ=20 。
(1)稳态运行Uₙ*=5V,I_dL=10A:
转速n=Uₙ*/Uₙₘ* ·nN=5/15 x1500 = 500r/min。
电流反馈系数β=Uᵢₘ*/I_max=15/40=0.375V/A。
电流给定β=Uᵢ*=β ·I_d=0.375 x 10 = 3.75V。
电枢电U_d0=C_e · n + I_d · R=0.127 x 500 + 10 x 2 = 83.5V。
触发电压U_c=U_d0/K_s=83.5/20=4.175V。
(2)堵转时:
电流给定Uᵢ*=15V(ASR 限幅值)。
电枢电压U_d0=I_max · R=40 x 2 = 80V。
触发电压U_c=80/20=4V。
答案:
(1)n = 500r/min,Uᵢ*=3.75V,Uᵢ=3.75V,U_c=4.175V。
(2)堵转时Uᵢ*=15V,U_c=4V。
六、分析题:本大题共 1 小题,每小题 15 分,共 15 分。
30. 直流 PWM 可逆调速系统转速反向的过渡过程可分为以下几个阶段(结合图中关键点分析):
1. 初始状态(正转运行,点 a→b)
转速:稳定在 +n(正向)。
电流:I_d为正值(I_dL或更高),对应正向电磁转矩 Tₑ。
PWM状态:正组变流器(如VT1)导通,输出正向电压,维持正转。
2.减速制动阶段(点b→c→d)
触发条件:转速指令突变为 -n,系统切换PWM控制信号。
电流变化:
点b→c:正组变流器关断,反组变流器(如VT2)投入,电枢电压极性反向,I_d迅速减小至零(点c)。
。点c→d:电流反向增大至 -I_dm,形成反向电磁转矩 一Tₑ ,转速n 开始下降。
系统模式:进入回馈制动状态,动能通过反组变流器回馈至电源。
3.反向加速阶段(点d→e→f)
电流调节:
点d→e:电流环限制最大反向电流 -I_dm,维持强制动转矩,转速n 快速降为零并反向加速。
点e→f:转速接近 -n 时,电流逐渐减小至反向稳态值 -I_dL。
PWM状态:反组变流器持续导通,输出反向电压,驱动电机加速至 -n。
4.反向稳态运行(点f之后)
转速:稳定在 -n(反向)。
电流:Id=-I_dL,维持反向恒定转矩 Tₑ =-T˪
PWM状态:反组变流器占空比稳定,系统进入新稳态。
关键动态特性
1.电流突变与缓变:
突变:PWM切换瞬间因电枢电感作用,电流快速反向。
缓变,转速反向时,机械惯性导致电流按指数规律变化2.双团环作用:
电流环:限制 I_d峰值(士I_dm),保护流器。
转速环:调节PWM占空比,确保转速跟踪指令 -n。
3.能量回馈:制动阶段电机作为发电机运行,电能回馈电网,提高效率。
结论
图中曲线完整呈现了转速反向时电流 I_d的动态响应过程,体现了直流 PWM 可逆调速系统快速、可控的转矩切换能力,以及双闭环控制对动态性能的优化作用。
(答案仅供参考,以官版评分标准为准。)
(2)本站自学考试信息供自考生参考,权威信息以各省(市)考试院官方为准。



教材2023版.jpg)

暂无评论内容